Workflow
How does it work?
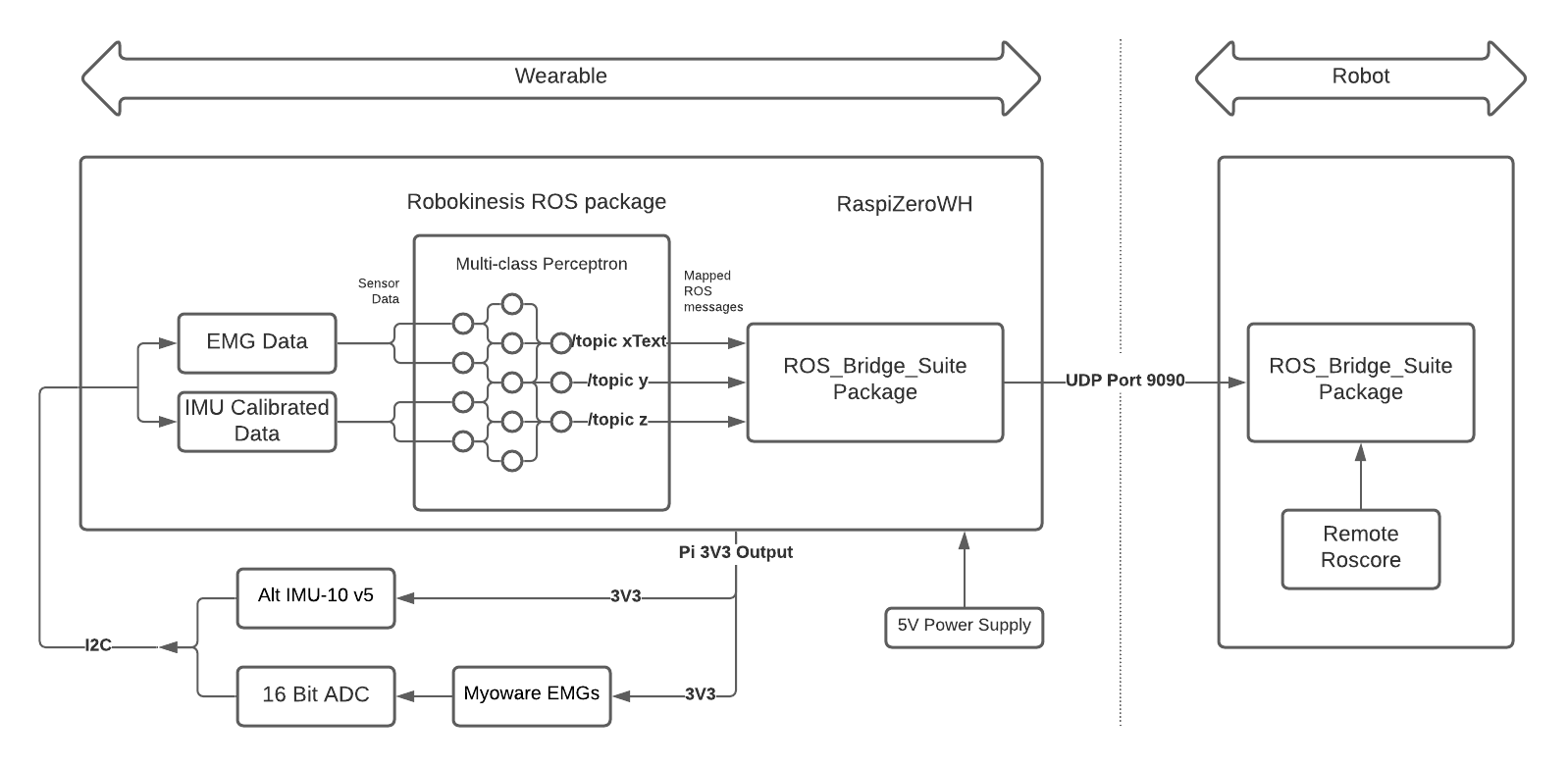
Robokinesis ROS package has 2 nodes:
Perceptron node: uses single layer multi-class perceptron to train a model that maps the input raw sensor data to distinguishable signals
Core node: maps the distinguishable sensor data to ROS topics at user-defined range and frequency
The Ros-Bridge-Suite package subscribes to converted ROS topics and streams to the remote robot over a WebSocket connection
The diagram below shows the entire software architecture, along with hardware connections.
Author: Mihir Patel